
{kind=link}
[ad_1]
A grand imaginative and prescient in robotic studying, going again to the SHRDLU experiments within the late Nineteen Sixties, is that of useful robots that inhabit human areas and comply with all kinds of pure language instructions. Over the previous couple of years, there have been important advances within the software of machine studying (ML) for instruction following, each in simulation and in actual world programs. Recent Palm-SayCan work has produced robots that leverage language fashions to plan long-horizon behaviors and purpose about summary objectives. Code as Policies has proven that code-generating language fashions mixed with pre-trained notion programs can produce language conditioned insurance policies for zero shot robotic manipulation. Despite this progress, an essential lacking property of present “language in, actions out” robotic studying programs is actual time interplay with people.
Ideally, robots of the long run would react in actual time to any related job a consumer might describe in pure language. Particularly in open human environments, it might be essential for finish customers to customise robotic conduct as it’s occurring, providing fast corrections (“cease, transfer your arm up a bit”) or specifying constraints (“nudge that slowly to the fitting”). Furthermore, real-time language might make it simpler for folks and robots to collaborate on complicated, long-horizon duties, with folks iteratively and interactively guiding robotic manipulation with occasional language suggestions.
 |
| The challenges of open-vocabulary language following. To be efficiently guided by an extended horizon job like “put all of the blocks in a vertical line”, a robotic should reply exactly to all kinds of instructions, together with small corrective behaviors like “nudge the pink circle proper a bit”. |
However, getting robots to comply with open vocabulary language poses a big problem from a ML perspective. This is a setting with an inherently giant variety of duties, together with many small corrective behaviors. Existing multitask studying setups make use of curated imitation studying datasets or complicated reinforcement studying (RL) reward features to drive the educational of every job, and this important per-task effort is tough to scale past a small predefined set. Thus, a crucial open query within the open vocabulary setting is: how can we scale the gathering of robotic information to incorporate not dozens, however lots of of 1000’s of behaviors in an atmosphere, and the way can we join all these behaviors to the pure language an finish consumer may really present?
In Interactive Language, we current a big scale imitation studying framework for producing real-time, open vocabulary language-conditionable robots. After coaching with our method, we discover that an individual coverage is succesful of addressing over 87,000 distinctive directions (an order of magnitude bigger than prior works), with an estimated common success charge of 93.5%. We are additionally excited to announce the discharge of Language-Table, the biggest out there language-annotated robotic dataset, which we hope will drive additional analysis targeted on real-time language-controllable robots.
| Guiding robots with actual time language. |
Real Time Language-Controllable Robots
Key to our method is a scalable recipe for creating giant, various language-conditioned robotic demonstration datasets. Unlike prior setups that outline all the talents up entrance after which acquire curated demonstrations for every talent, we repeatedly acquire information throughout a number of robots with out scene resets or any low-level talent segmentation. All information, together with failure information (e.g., knocking blocks off a desk), goes by a hindsight language relabeling course of to be paired with textual content. Here, annotators watch lengthy robotic movies to establish as many behaviors as doable, marking when every started and ended, and use freeform pure language to explain every section. Importantly, in distinction to prior instruction following setups, all abilities used for coaching emerge backside up from the information itself quite than being decided upfront by researchers.
Our studying method and structure are deliberately easy. Our robotic coverage is a cross-attention transformer, mapping 5hz video and textual content to 5hz robotic actions, utilizing a typical supervised studying behavioral cloning goal with no auxiliary losses. At check time, new spoken instructions might be despatched to the coverage (through speech-to-text) at any time as much as 5hz.
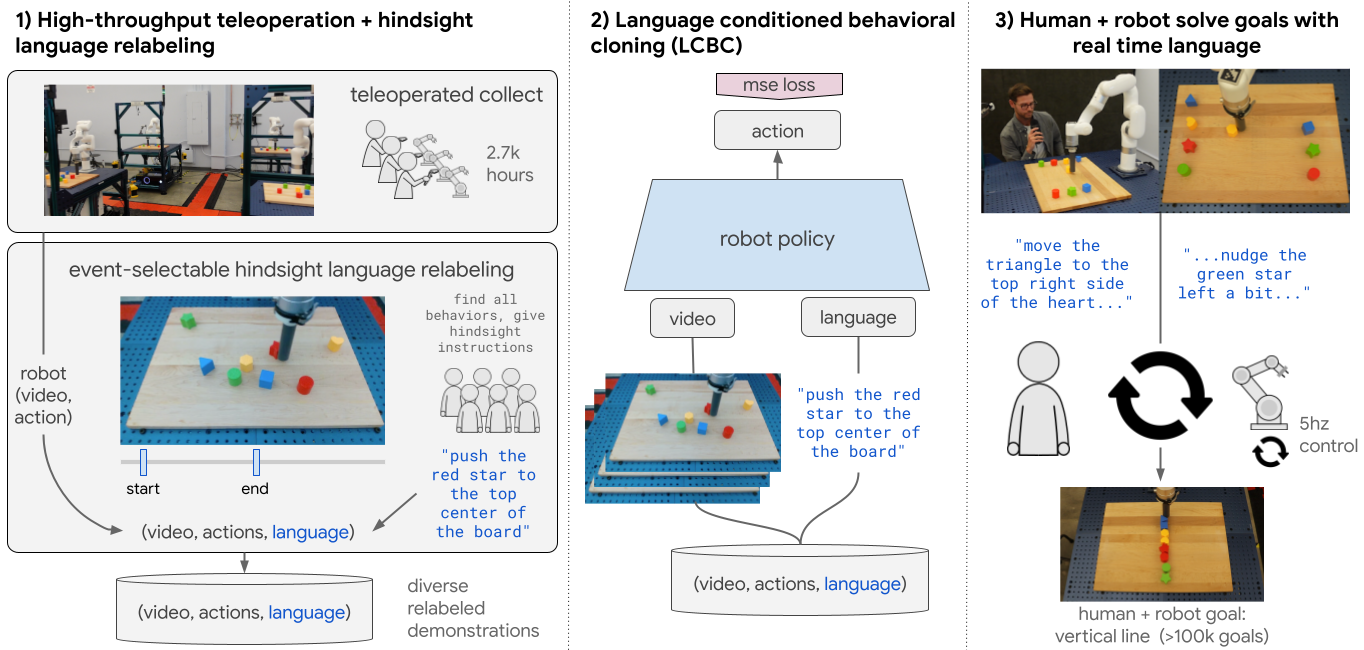 |
| Interactive Language: an imitation studying system for producing actual time language-controllable robots. |
Open Source Release: Language-Table Dataset and Benchmark
This annotation course of allowed us to gather the Language-Table dataset, which accommodates over 440k actual and 180k simulated demonstrations of the robotic performing a language command, together with the sequence of actions the robotic took through the demonstration. This is the biggest language-conditioned robotic demonstration dataset of its variety, by an order of magnitude. Language-Table comes with a simulated imitation studying benchmark that we use to carry out mannequin choice, which can be utilized to guage new instruction following architectures or approaches.
| Dataset | # Trajectories (ok) | # Unique (ok) | Physical Actions | Real | Available |
| Episodic Demonstrations | |||||
| BC-Z | 25 |
0.1 |
✓ | ✓ | ✓ |
| SayCan | 68 |
0.5 |
✓ | ✓ | ❌ |
| Playhouse | 1,097 |
779 |
❌ | ❌ | ❌ |
| Hindsight Language Labeling | |||||
| BLOCKS | 30 |
n/a | ❌ | ❌ | ✓ |
| LangLFP | 10 |
n/a | ✓ | ❌ | ❌ |
| LOREL | 6 |
1.7 |
✓ | ✓ | ✓ |
| CALVIN | 20 |
0.4 |
✓ | ❌ | ✓ |
| Language-Table (actual + sim) | 623 (442+181) | 206 (127+79) | ✓ | ✓ | ✓ |
| We evaluate Language-Table to current robotic datasets, highlighting proportions of simulated (pink) or actual (blue) robotic information, the variety of trajectories collected, and the variety of distinctive language describable duties. |
Learned Real Time Language Behaviors
 |
| Examples of brief horizon directions the robotic is able to following, sampled randomly from the complete set of over 87,000. |
| Short-Horizon Instruction | Success |
| (87,000 extra…) | … |
| push the blue triangle to the highest left nook | 80.0% |
| separate the pink star and pink circle | 100.0% |
| nudge the yellow coronary heart a bit proper | 80.0% |
| place the pink star above the blue dice | 90.0% |
| level your arm on the blue triangle | 100.0% |
| push the group of blocks left a bit | 100.0% |
| Average over 87k, CI 95% | 93.5% +- 3.42% |
| 95% Confidence interval (CI) on the common success of a person Interactive Language coverage over 87,000 distinctive pure language directions. |
We discover that attention-grabbing new capabilities come up when robots are capable of comply with actual time language. We present that customers can stroll robots by complicated long-horizon sequences utilizing solely pure language to unravel for objectives that require a number of minutes of exact, coordinated management (e.g., “make a smiley face out of the blocks with inexperienced eyes” or “place all of the blocks in a vertical line”). Because the robotic is skilled to comply with open vocabulary language, we see it will possibly react to a various set of verbal corrections (e.g., “nudge the pink star barely proper”) that may in any other case be tough to enumerate up entrance.
 |
| Examples of lengthy horizon objectives reached beneath actual time human language steering. |
Finally, we see that actual time language permits for brand spanking new modes of robotic information assortment. For instance, a single human operator can management 4 robots concurrently utilizing solely spoken language. This has the potential to scale up the gathering of robotic information sooner or later with out requiring undivided human consideration for every robotic.
 |
| One operator controlling a number of robots directly with spoken language. |
Conclusion
While presently restricted to a tabletop with a set set of objects, Interactive Language exhibits preliminary proof that giant scale imitation studying can certainly produce actual time interactable robots that comply with freeform finish consumer instructions. We open supply Language-Table, the biggest language conditioned real-world robotic demonstration dataset of its variety and an related simulated benchmark, to spur progress in actual time language management of bodily robots. We imagine the utility of this dataset could not solely be restricted to robotic management, however could present an attention-grabbing place to begin for learning language- and action-conditioned video prediction, robotic video-conditioned language modeling, or a bunch of different attention-grabbing energetic questions within the broader ML context. See our paper and GitHub web page to study extra.
Acknowledgements
We wish to thank everybody who supported this analysis. This consists of robotic teleoperators: Alex Luong, Armando Reyes, Elio Prado, Eric Tran, Gavin Gonzalez, Jodexty Therlonge, Joel Magpantay, Rochelle Dela Cruz, Samuel Wan, Sarah Nguyen, Scott Lehrer, Norine Rosales, Tran Pham, Kyle Gajadhar, Reece Mungal, and Nikauleene Andrews; robotic {hardware} assist and teleoperation coordination: Sean Snyder, Spencer Goodrich, Cameron Burns, Jorge Aldaco, Jonathan Vela; information operations and infrastructure: Muqthar Mohammad, Mitta Kumar, Arnab Bose, Wayne Gramlich; and the various who helped present language labeling of the datasets. We would additionally prefer to thank Pierre Sermanet, Debidatta Dwibedi, Michael Ryoo, Brian Ichter and Vincent Vanhoucke for his or her invaluable recommendation and assist.
[ad_2]