
{kind=link}
[ad_1]
Plastic ketchup bottles have a valve within the lid that opens to let ketchup out, and that typically “sputters” if the bottle is squeezed too arduous. Dutch scientists have copied that mechanism to create an actuator that could possibly be utilized in autonomous smooth robotic units.
Designed by a crew on the Eindhoven University of Technology, the gadget is called a “hysteretic valve.” It emulates ketchup bottle valves’ tendency to quickly and repeatedly open and shut (letting a little bit of ketchup out every time), even when the bottle is being easily and evenly squeezed.
Such a response may appear undesirable – and it is, in ketchup bottles. In a robotic, although, the concept is that if air have been pumped by such a valve right into a smooth pneumatic leg or finger, the sputtering motion would trigger the appendage to repeatedly develop and contract, shifting backwards and forwards because it did so.
What’s extra, the motion could be initiated by a easy analogue mechanism, versus extra complicated and power-hungry electronics. It’s even potential that the air pump could possibly be triggered by adjustments within the robotic’s setting, eliminating the necessity for exterior management.
Eindhoven University of Technology
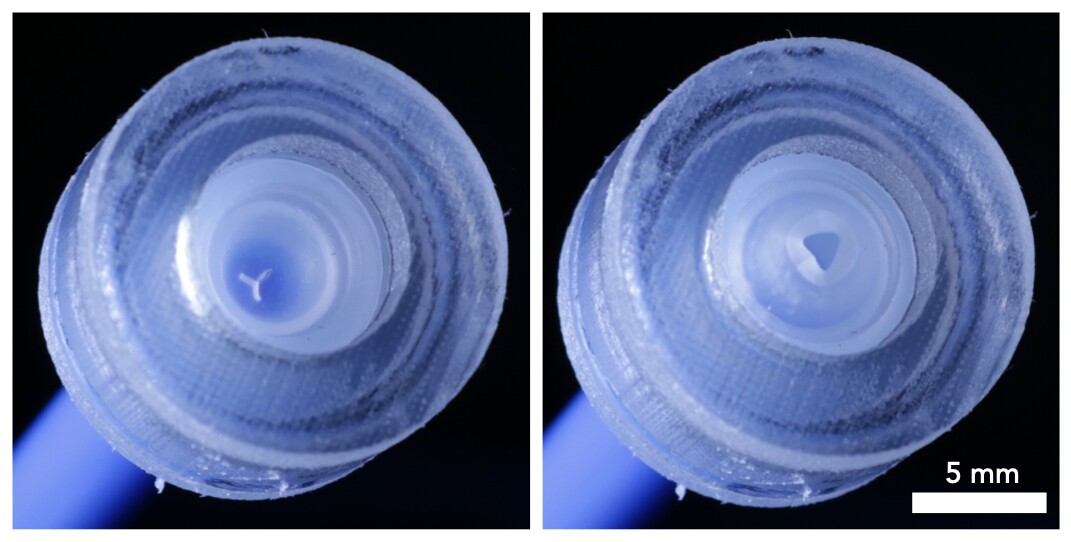
Putting it pretty merely, the hysteretic valve consists of a flat silicone base with slits laser-cut into it. Flaps fashioned by the slits stay closed till the air stress behind them reaches a sure threshold, at which level they open and launch the air. They then shut once more, and the cycle repeats itself time and again.
Unexpectedly, it was discovered that when two of the valves are linked to at least one pump, they have an inclination to open and shut out of step with each other – in different phrases, one valve is open when the opposite is closed. Utilizing this impact, the researchers created a soft-bodied robotic that walks utilizing 4 alternately stepping legs. They additionally created a robotic hand, that sequentially thrums its pneumatic fingers.
A paper on the analysis, which is being led by Assoc. Prof. Bas Overvelde and PhD researcher Luuk van Laake, was revealed within the journal Matter. The quadruped robotic and the robotic hand will be seen in motion, within the video under.
A fluidic leisure oscillator for reprogrammable sequential actuation in smooth robots
[ad_2]