
{kind=link}

A brand new wheeled robotic is ready to climb metallic buildings in a really intelligent and distinctive method – it makes use of an extendible tape-measure limb. Descendants of the bot could in the future discover use inspecting and even repairing issues like towers, bridges, energy stations and ships.
Although we have seen different robots that may make their method up vertical metallic surfaces, most of them make the most of both a mix of vacuum programs and wheels, or legs with magnetic toes. The former bots usually cannot make their method over even comparatively small obstacles, nonetheless, whereas the latter ones are typically slow-moving and mechanically advanced.
That’s the place the EEWOC (Extended-reach Enhanced Wheeled Orb for Climbing) is designed to come back in. The experimental robotic was created by Justin Quan, Mingzhang Zhu and Dennis Hong from UCLA’s Robotics & Mechanisms Laboratory (RoMeLa).
When on the bottom or different horizontal surfaces, the self-balancing bot rolls alongside on its two wheels. Once it is time to get climbing, although, the EEWOC vertically extends a bit one thing generally known as its EEMMMa (Elastic Extending Mechanism for Mobility and Manipulation) limb.
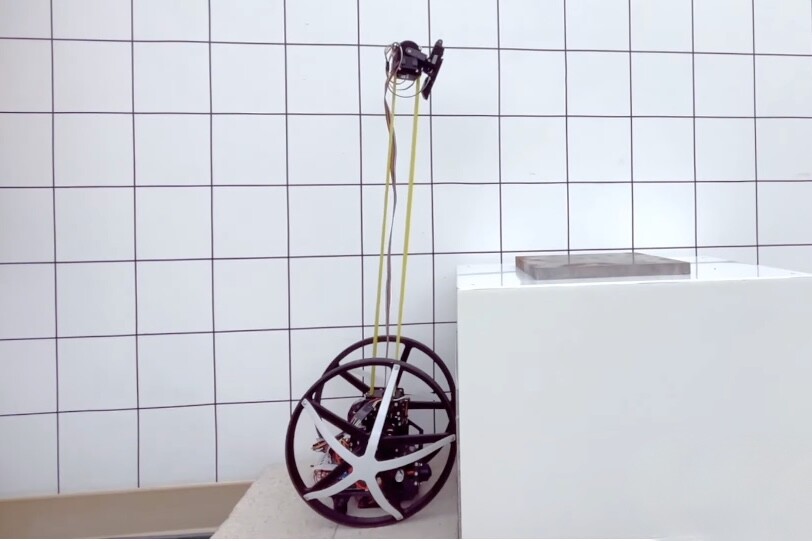
RoMeLa
This gadget incorporates a motorized spool of metallic measuring tape positioned contained in the robotic’s physique. The tape itself extends straight up out of the robotic, bends round to kind an upside-down U form, then runs again right down to be anchored to the highest of the bot.
At the bend within the inverted U, the tape runs over a pulley inside an “end-effector” device. Among different issues, this device incorporates a top-mounted adjustable-angle electromagnet.
For straight-up climbing, the EEMMMa begins by extending its tape. Doing so causes the limb to elongate (as much as a most attain of 1.2 m/3.9 ft), with the end-effector device all the time staying within the bend on the high. The magnet on that device then grips the metallic, after which the robotic pulls itself up to the device just by winding the tape again onto its spool. When the EEMMMa is launched and re-extended for the subsequent leg of the climb, the robotic stays in place on the metallic construction utilizing a bottom-mounted magnet of its personal.

RoMeLa
For climbing up and round ledges, the EEMMMa nonetheless extends its tape however the end-effector basically applies a brake, conserving the tape from transferring by way of it. This causes the tape to bunch up and kink at a proper angle, letting the magnet attain its otherwise-inaccessible goal. The bot then pulls itself as much as the magnet, rolling over the ledge within the course of.
This video supplies a extra detailed rationalization of how the limb works – the article continues under it.
Novel Extending and Bending Robotic Limb EEMMMa – ASME JMR 2022 2-Minute Overview
In its present kind, the EEWOC has a diameter of 260 mm (10.2 in) and it ideas the scales at simply 2.1 kg (4.6 lb). The robotic additionally has a most climbing pace of 0.24 meters per second (0.79 ft/s), reportedly making it one of many quickest climbing robots ever made.
Future plans embrace equipping the bot with a number of EEMMMa’s that may be prolonged in numerous instructions for omnidirectional motion. The scientists additionally envision using non-magnetic EEMMMa grippers that may as a substitute grasp surfaces akin to timber or partitions.
You can see the robotic in metal-climbing motion, within the video under – the factor may even be seen swinging throughout horizontal gaps, Indiana-Jones-style. Papers on each the EEWOC and the EEMMMa had been introduced on the quite long-named ASME 2023 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference.
A Climbing Robot with Long Extending and Bending Tape Measure Limb – EEWOC
Source: RoMeLa by way of IEEE Spectrum