
{kind=link}
[ad_1]
When designing fish-like underwater robots, you need a technique of propulsion which is each energy-efficient and fairly speedy. A brand new tail-flapping system might match the invoice, paving the way in which for wider utilization of such bots.
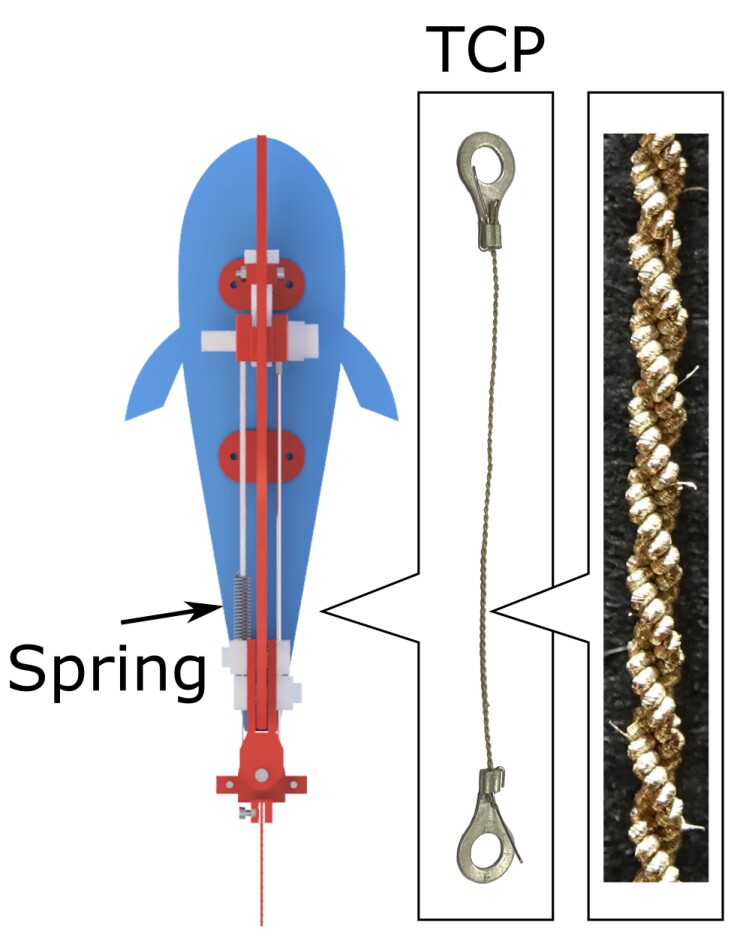
The experimental setup has been integrated right into a robotic fish constructed by a crew of scientists on the University of Bristol, led by PhD pupil Tsam Lung You. It makes use of a modified model of a mechanism often called a twisted and coiled polymer (TCP).
In a nutshell, TCPs take the type of a coiled line, not not like a landline phone’s handset wire. When the road is heated it coils tighter, contracting like a muscle. When the warmth is eliminated the road relaxes once more, returning to its default size.
One limitation of such units lies in the truth that they can not produce repetitive actions in a short time, because it takes no less than a second or so earlier than they will contract once more. The robotic fish addresses that drawback.
Tsam Lung You
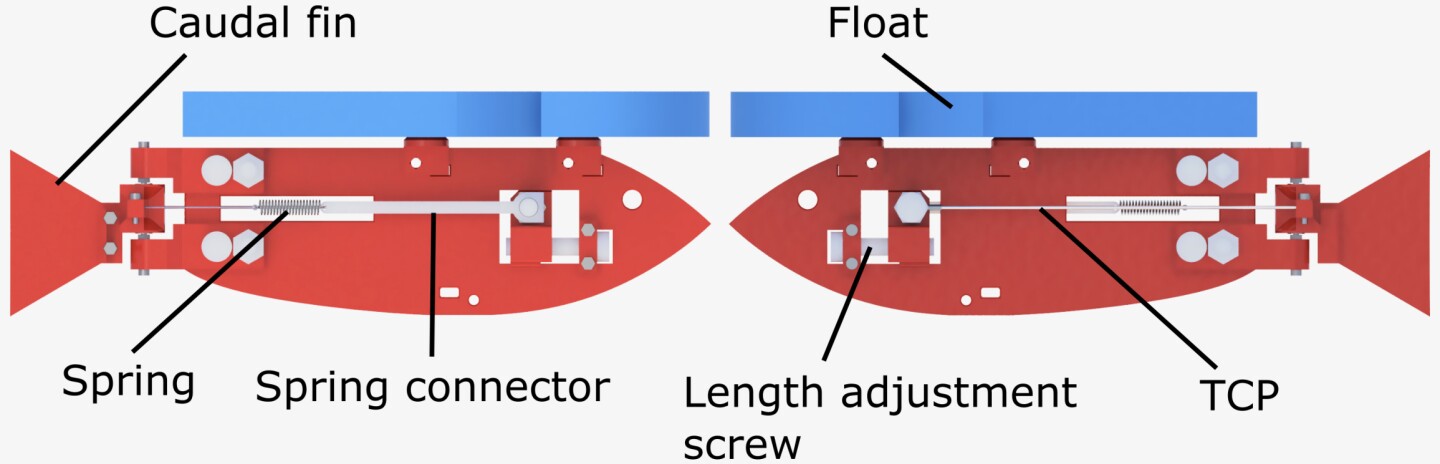
It incorporates each a conductive-yarn TCP and a standard metal coil spring, which lie side-by-side alongside the size of the robotic. They’re related to reverse sides of a tail-flapping mechanism on the rear finish of the bot, and are related to at least one one other through a linkage on the entrance.
When {an electrical} present is utilized to the TCP it heats up and contracts, concurrently pulling the tail to at least one aspect and stretching the coil spring. When the present ceases and the TCP relaxes, the stretched spring contracts, pulling the tail to the opposite aspect. By the time the tail has completed going to that aspect, the TCP is able to contract and pull it again once more.
Tsam Lung You
In water tank assessments, the robotic was in a position to swim at a tail-flapping price of two waves per second. The scientists are actually incorporating the know-how right into a extra agile robotic knifefish, which has an auger-like fin that runs alongside the size of its underside.
“Our robotic fish swam on the quickest actuation frequency present in an actual TCP software and in addition the best locomotion pace of a TCP software thus far,” stated You. “This is absolutely thrilling because it opens up extra alternatives of TCP software in numerous areas.”
A paper on the analysis was introduced earlier this month on the sixth IEEE-RAS International Conference on Soft Robotics, in Singapore. The robotic may be seen in motion, within the video beneath.
TCP-propelled robotic fish
Source: University of Bristol
[ad_2]