
{kind=link}
[ad_1]
Once once more, know-how has been impressed by nature. After inspecting how centipedes traverse tough terrain, researchers created a multi-legged robotic that mimics their curved, side-to-side motion, offering higher stability and maneuverability.
Centipedes and millipedes are myriapods, animals with elongated our bodies made up of quite a few comparable segments, almost all of which have jointed legs connected. Centipedes can transfer successfully in various terrain as a result of their versatile our bodies and the variety of limbs permit them to adapt their form to the setting.
Researchers attempting to create biomimetic multi-legged robots have usually discovered that they battle. When one leg malfunctions on account of repeated stress, it may possibly restrict the robotic’s capability to maneuver. And controlling a giant variety of legs requires quite a lot of laptop energy. Now, researchers from Osaka University in Japan developed their very own robotic myriapod with six segments, every containing two legs, and versatile joints.
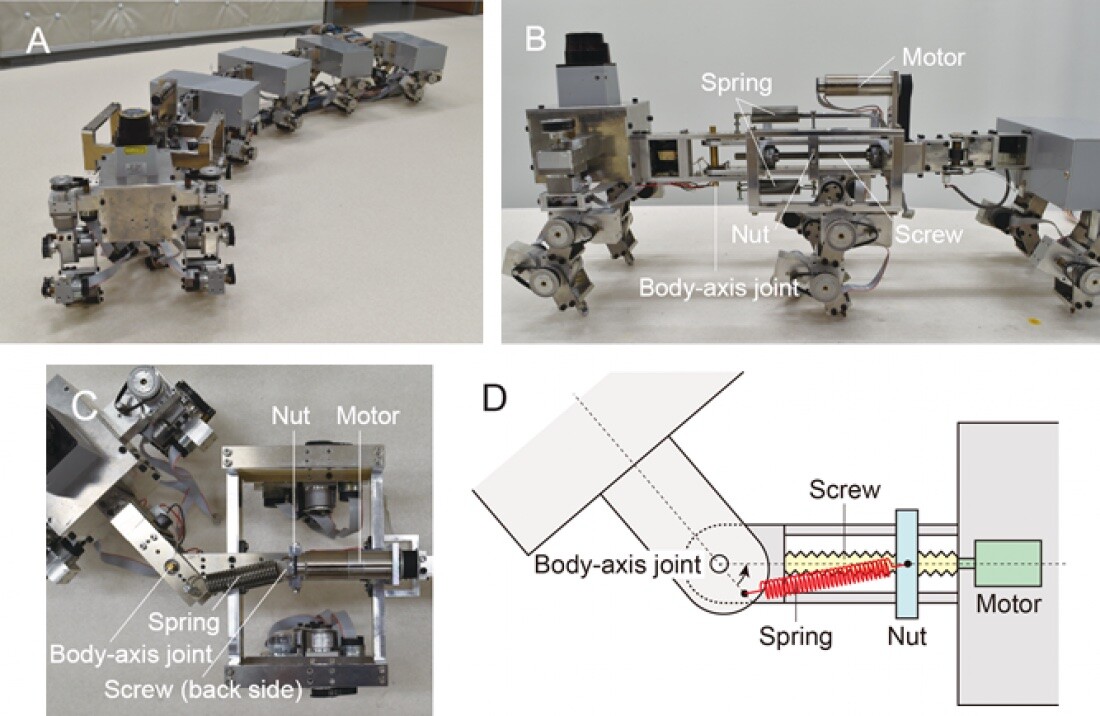
The robotic is 53 in (135 cm) in size and weighs 20 lb (9.1 kg). Its six separate segments have a pair of legs connected consisting of two hyperlinks linked by versatile joints that permit for yaw or motion in numerous instructions.
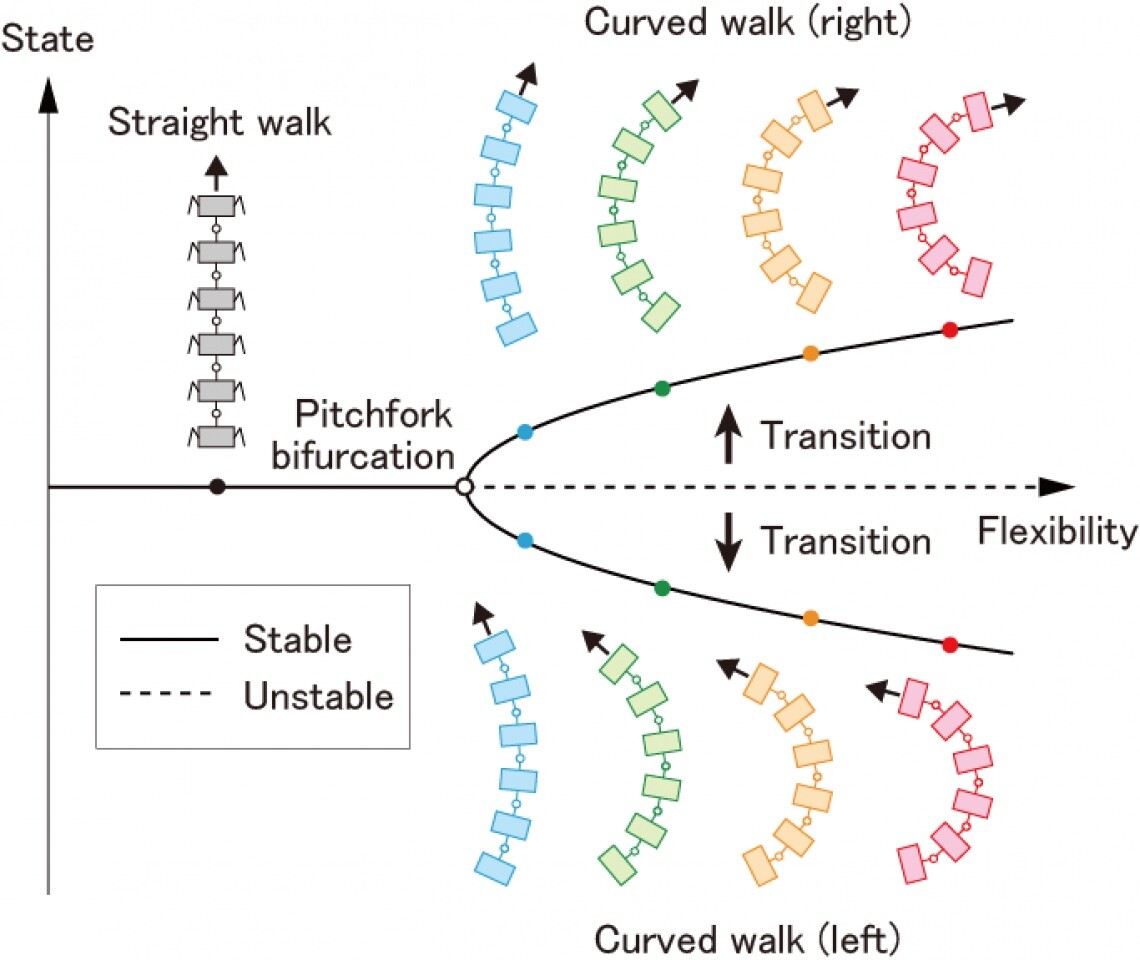
The researchers discovered that rising joint flexibility led to ‘pitchfork bifurcation,’ the place straight strolling turns into unstable. Instead of correcting the instability, the researchers ran with it, permitting the robotic to stroll in a curved sample, both to the left or the best, identical to a centipede would.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” stated Shinya Aoi, lead writer of the research.
The researchers discovered that circuitously steering the robotic however, as an alternative, controlling its body-axis flexibility enormously diminished the computational complexity and the vitality necessities wanted to function the robotic.
After testing the robotic’s motion, they discovered that it might make its technique to a goal by way of a curved path. The researchers see many purposes for his or her robotic myriapod.
“We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration of other planets,” stated Mau Adachi, one of many research’s co-authors.
In future, the researchers plan to check their design in more difficult environments, resembling on tough terrain.
The research was printed within the journal Soft Robotics, and the beneath video, by the lead writer, Shinya Aoi, demonstrates the robotic’s maneuverability in reaching set targets.
Myriapod robotic with variable body-axis flexibility
Source: Osaka University
[ad_2]