
[ad_1]
Recently, differential privateness (DP) has emerged as a mathematically strong notion of person privateness for knowledge aggregation and machine studying (ML), with sensible deployments together with the 2022 US Census and in business. Over the previous couple of years, we’ve got open-sourced libraries for privacy-preserving analytics and ML and have been constantly enhancing their capabilities. Meanwhile, new algorithms have been developed by the analysis neighborhood for a number of analytic duties involving personal aggregation of information.
One such necessary knowledge aggregation methodology is the heatmap. Heatmaps are standard for visualizing aggregated knowledge in two or extra dimensions. They are extensively utilized in many fields together with pc imaginative and prescient, picture processing, spatial knowledge evaluation, bioinformatics, and extra. Protecting the privateness of person knowledge is vital for a lot of functions of heatmaps. For instance, heatmaps for gene microdata are primarily based on personal knowledge from people. Similarly, a heatmap of standard areas in a geographic space are primarily based on person location check-ins that have to be saved personal.
Motivated by such functions, in “Differentially Private Heatmaps” (offered at AAAI 2023), we describe an environment friendly DP algorithm for computing heatmaps with provable ensures and consider it empirically. At the core of our DP algorithm for heatmaps is an answer to the essential drawback of methods to privately mixture sparse enter vectors (i.e., enter vectors with a small variety of non-zero coordinates) with a small error as measured by the Earth Mover’s Distance (EMD). Using a hierarchical partitioning process, our algorithm views every enter vector, in addition to the output heatmap, as a chance distribution over a lot of objects equal to the dimension of the info. For the issue of sparse aggregation beneath EMD, we give an environment friendly algorithm with error asymptotically near the absolute best.
Algorithm description
Our algorithm works by privatizing the aggregated distribution (obtained by averaging over all person inputs), which is adequate for computing a remaining heatmap that’s personal as a result of the post-processing property of DP. This property ensures that any transformation of the output of a DP algorithm stays differentially personal. Our essential contribution is a brand new privatization algorithm for the aggregated distribution, which we are going to describe subsequent.
The EMD measure, which is a distance-like measure of dissimilarity between two chance distributions initially proposed for pc imaginative and prescient duties, is well-suited for heatmaps because it takes the underlying metric area into consideration and considers “neighboring” bins. EMD is utilized in a wide range of functions together with deep studying, spatial evaluation, human mobility, picture retrieval, face recognition, visible monitoring, form matching, and extra.
To obtain DP, we have to add noise to the aggregated distribution. We would additionally wish to protect statistics at completely different scales of the grid to attenuate the EMD error. So, we create a hierarchical partitioning of the grid, add noise at every stage, after which recombine into the ultimate DP aggregated distribution. In explicit, the algorithm has the next steps:
- Quadtree development: Our hierarchical partitioning process first divides the grid into 4 cells, then divides every cell into 4 subcells; it recursively continues this course of till every cell is a single pixel. This process creates a quadtree over the subcells the place the basis represents all the grid and every leaf represents a pixel. The algorithm then calculates the full chance mass for every tree node (obtained by including up the aggregated distribution’s possibilities of all leaves within the subtree rooted at this node). This step is illustrated under.

In step one, we take the (non-private) aggregated distribution (high left) and repeatedly divide it to create a quadtree. Then, we compute the full chance mass is every cell (backside). - Noise addition: To every tree node’s mass we then add Laplace noise calibrated to the use case.
- Truncation: To assist scale back the ultimate quantity of noise in our DP aggregated distribution, the algorithm traverses the tree ranging from the basis and, at every stage, it discards all however the high w nodes with highest (noisy) lots along with their descendants.
- Reconstruction: Finally, the algorithm solves a linear program to recuperate the aggregated distribution. This linear program is impressed by the sparse restoration literature the place the noisy lots are seen as (noisy) measurements of the info.

{kind=link}
 |
| In step 2, noise is added to every cell’s chance mass. Then in step 3, solely top-w cells are saved (inexperienced) whereas the remaining cells are truncated (pink). Finally, within the final step, we write a linear program on these high cells to reconstruct the aggregation distribution, which is now differentially personal. |
Experimental outcomes
We consider the efficiency of our algorithm in two completely different domains: real-world location check-in knowledge and picture saliency knowledge. We contemplate as a baseline the ever-present Laplace mechanism, the place we add Laplace noise to every cell, zero out any adverse cells, and produce the heatmap from this noisy mixture. We additionally contemplate a “thresholding” variant of this baseline that’s extra suited to sparse knowledge: solely hold high t% of the cell values (primarily based on the chance mass in every cell) after noising whereas zeroing out the remainder. To consider the standard of an output heatmap in comparison with the true heatmap, we use Pearson coefficient, KL-divergence, and EMD. Note that when the heatmaps are extra comparable, the primary metric will increase however the latter two lower.
The areas dataset is obtained by combining two datasets, Gowalla and Brightkite, each of which comprise check-ins by customers of location-based social networks. We pre-processed this dataset to contemplate solely check-ins within the continental US leading to a remaining dataset consisting of ~500,000 check-ins by ~20,000 customers. Considering the highest cells (from an preliminary partitioning of all the area right into a 300 x 300 grid) which have check-ins from no less than 200 distinctive customers, we partition every such cell into subgrids with a decision of ∆ × ∆ and assign every check-in to one among these subgrids.
In the primary set of experiments, we repair ∆ = 256. We check the efficiency of our algorithm for various values of ε (the privateness parameter, the place smaller ε means stronger DP ensures), starting from 0.1 to 10, by working our algorithms along with the baseline and its variants on all cells, randomly sampling a set of 200 customers in every trial, after which computing the gap metrics between the true heatmap and the DP heatmap. The common of those metrics is offered under. Our algorithm (the pink line) performs higher than all variations of the baseline throughout all metrics, with enhancements which can be particularly important when ε just isn’t too giant or small (i.e., 0.2 ≤ ε ≤ 5).
 |
| Metrics averaged over 60 runs when various ε for the placement dataset. Shaded areas point out 95% confidence interval. |
Next, we examine the impact of various the quantity n of customers. By fixing a single cell (with > 500 customers) and ε, we range n from 50 to 500 customers. As predicted by concept, our algorithms and the baseline carry out higher as n will increase. However, the habits of the thresholding variants of the baseline are much less predictable.
We additionally run one other experiment the place we repair a single cell and ε, and range the decision ∆ from 64 to 256. In settlement with concept, our algorithm’s efficiency stays almost fixed for all the vary of ∆. However, the baseline suffers throughout all metrics as ∆ will increase whereas the thresholding variants often enhance as ∆ will increase.
 |
| Effect of the variety of customers and grid decision on EMD. |
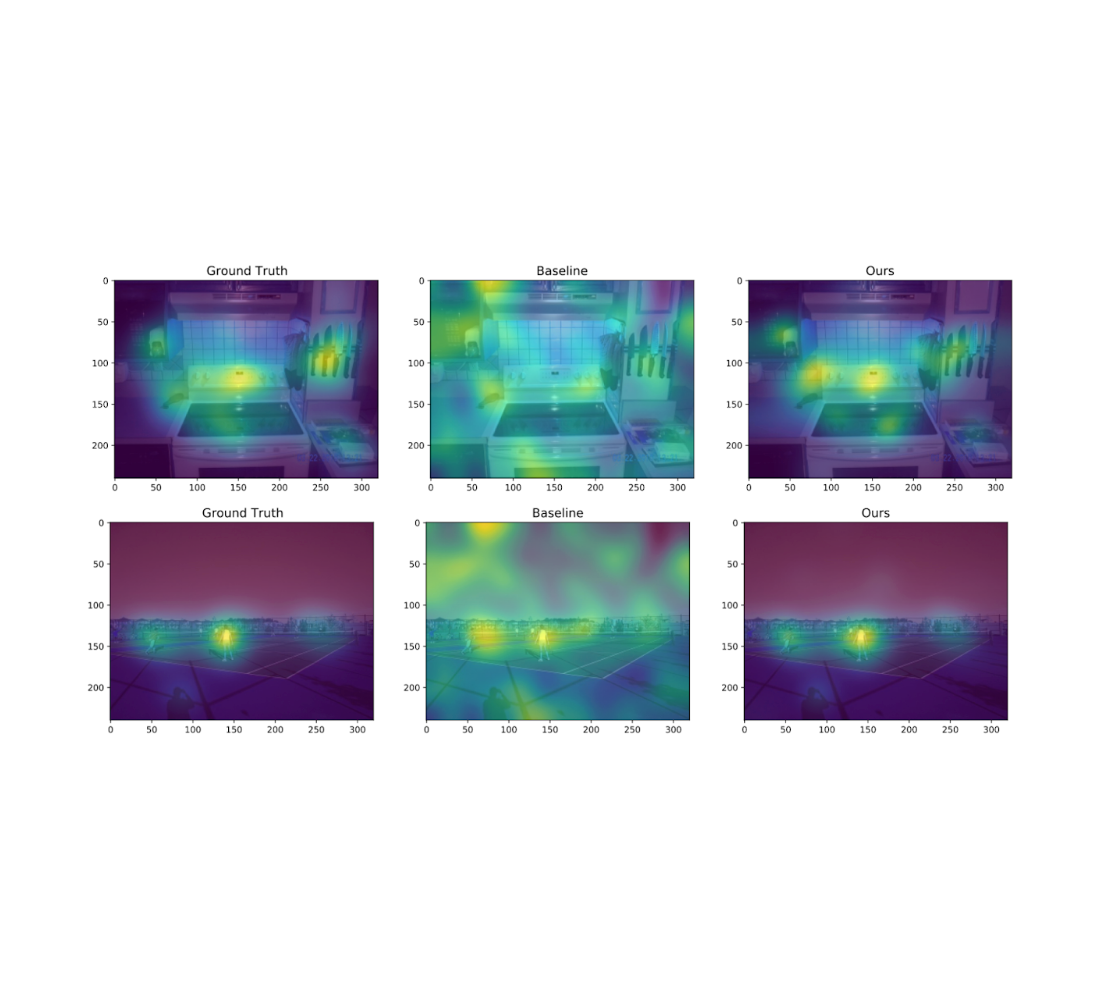
We additionally experiment on the Salicon picture saliency dataset (SALICON). This dataset is a set of saliency annotations on the Microsoft Common Objects in Context picture database. We downsized the photographs to a set decision of 320 × 240 and every [user, image] pair consists of a sequence of coordinates within the picture the place the person appeared. We repeat the experiments described beforehand on 38 randomly sampled photos (with ≥ 50 customers every) from SALICON. As we are able to see from the examples under, the heatmap obtained by our algorithm could be very near the bottom fact.
 |
| Example visualization of various algorithms for 2 completely different pure photos from SALICON for ε = 10 and n = 50 customers. The algorithms from left to proper are: authentic heatmap (no privateness), baseline, and ours. |
Additional experimental outcomes, together with these on different datasets, metrics, privateness parameters and DP fashions, might be discovered within the paper.
Conclusion
We offered a privatization algorithm for sparse distribution aggregation beneath the EMD metric, which in flip yields an algorithm for producing privacy-preserving heatmaps. Our algorithm extends naturally to distributed fashions that may implement the Laplace mechanism, together with the safe aggregation mannequin and the shuffle mannequin. This doesn’t apply to the extra stringent native DP mannequin, and it stays an attention-grabbing open query to plan sensible native DP heatmap/EMD aggregation algorithms for “moderate” variety of customers and privateness parameters.
Acknowledgments
This work was finished collectively with Junfeng He, Kai Kohlhoff, Ravi Kumar, Pasin Manurangsi, and Vidhya Navalpakkam.
[ad_2]