
{kind=link}
[ad_1]
Effectively, these bots are inbuilt segments, and every phase has its personal multicopter propulsion unit, able to vectoring thrust in any route because of multi-axis gimbal techniques. The segments are joined collectively, however able to articulating in a variety of various instructions, and the staff has labored out find out how to co-ordinate all these propulsion techniques in actual time, even because the construction modifications form whereas it flies. The idea was initially impressed by the considered flying dragons, and the best way these legendary beasts may easily undulate their our bodies within the air.
“When I used to be a toddler, I’m from China, so I used to be at all times dreaming of dragons,” says mission chief and Assistant Professor Moju Zhao. “There are a lot of bio-inspired robots, folks make robotic canines, robotic cats. The dragon shouldn’t be an actual animal, but it surely’s a form of holy image in Asia. Imagine this robotic as a flying human arm, to do manipulation within the air. To change a lamp, or open a door like a human arm. You may additionally suppose this robotic can rework like a snake; it might discover very slim areas.”
In the video beneath, you’ll be able to see the state of the staff’s “Dragon” robotic. It’s a bit wobbly and a bit gradual, however contemplating the complexity concerned in controlling a multirotor plane that is regularly altering its structural form and orientation, it is extremely spectacular. The robotic is proven starting to deal with fundamental duties, like pushing and pulling objects, and curling round on itself to create a flying gripper ring able to grabbing, compensating for, manipulating and releasing objects as much as 1 kg (2.2 lb) in weight.
Versatile Articulated Aerial Robot DRAGON: Aerial Manipulation and Grasping by Vectorable Thrust
It’s a reasonably extraordinary thought, a flying claw type of deal that might snake its approach round an space, seize issues and do helpful duties with them. Another video exhibits the Dragon utilizing pin-like attachments to open and shut massive valves, in upwards, downwards and horizontal orientations.
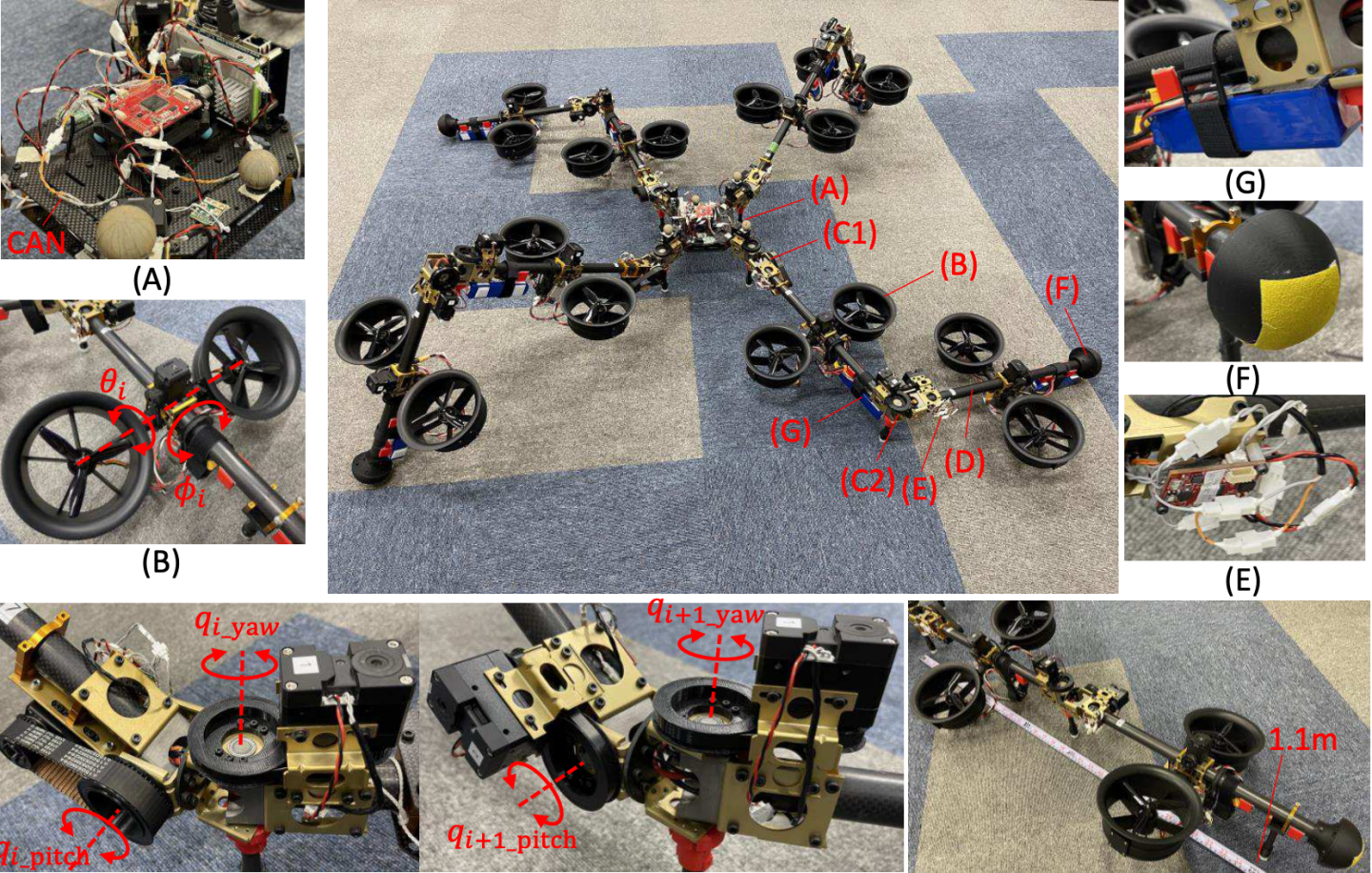
SPIDAR: SPherIcally vectorable and Distributed rotors assisted Air-ground amphibious quadruped Robot
The staff has been engaged on the Dragon for a variety of years now, and it is simple to see the potential of such a wildly versatile aerial platform as soon as the flight management software program will get faster and it begins shifting with extra velocity and fluidity.
Now, the staff has introduced a fair stranger tackle the idea, within the type of its new “SPIDAR” robotic, a torturous acronym for “SPherIcally vectorable and Distributed rotors assisted Air-ground amphibious quadruped Robot.”
The SPIDAR is a quadruped robotic with articulating joints on the hip and knee of every leg. These joints are weakly motorized to help with motion, however the staff sought to reduce redundant motors through the use of the vectored multicopter propulsion items on every phase as the first means to maneuver the legs – in addition to to elevate the complete 15 kg (33 lb) construction into the air.
Moju Zhao / University of Tokyo
As the video beneath exhibits, what you find yourself with is an especially gradual and noisy spider robotic, whose legs look weak and wobbly at this stage. It additionally appears to be like prefer it’s working onerous to remain airborne, with harmonic vibrations among the many propulsion items clearly an issue. The strolling movement appears to be like a bit pointless – it might stroll for 20 minutes, or fly for 9 minutes on its present battery setup, and it is instantly apparent that one minute of flying will take this factor additional than 10 minutes of strolling.
But it nonetheless raises some very cool potentialities; with a bit extra growth, this can change into a four-point flying claw gripper probably able to holding and manipulating two objects without delay; taking the lid off a jar, for instance, or holding a field whereas selecting one thing up and placing it within the field.
SPIDAR: SPherIcally vectorable and Distributed rotors assisted Air-ground amphibious quadruped Robot
Clearly, these are very early prototypes. But with a bit creativeness, we will see these creating into Matrix-style flying squid robots with as many arms as is sensible. With propulsion items on every tentacle or leg phase, the arms aren’t lifeless weight on the airframe; every is a help, and may present elevate with various levels of leverage relying on the place the load’s at. Such machines may carry out a number of duties without delay, probably locking their free “arms” to brace their buildings towards partitions, ceilings, flooring or different stable objects the place further power or leverage is required.
It’s a captivating idea, with the potential to create some exceptional and helpful flying robots with capabilities and varieties we have not likely seen in nature – they have been the stuff of delusion and sci-fi. Very neat.
A paper on the Spidar robotic is accessible right here.
Source: Moju Zhao/University of Tokyo through IEEE Spectrum
[ad_2]