
{kind=link}
[ad_1]
|
Listen to this text  |
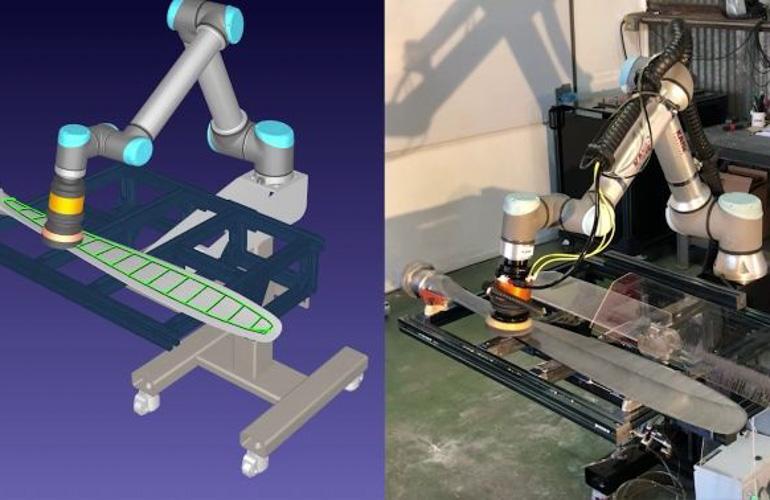
Robot simulation (left) and bodily robotic (proper) programmed utilizing the RoboDK API for Matlab. | Credit: RoboDK
The RoboDK API for Matlab permits robotic programmers to develop packages and simulate the motions utilizing Matlab code. This API supplies the instruments to work offline utilizing Matlab. The program can then be run on a simulated robotic to verify its validity earlier than working on a bodily robotic.
Matlab is a robust programming setting that gives the capabilities to calculate complicated paths, kinematics, and different high-level mathematic operations. RoboDK is a robust and cost-effective simulator for industrial robots and robotic programming.
RoboDK helps greater than 700 robots and greater than 50 robotic producers, together with robots like ABB, Fanuc, Yaskawa, Universal Robots, Motoman, Staubli, and extra.
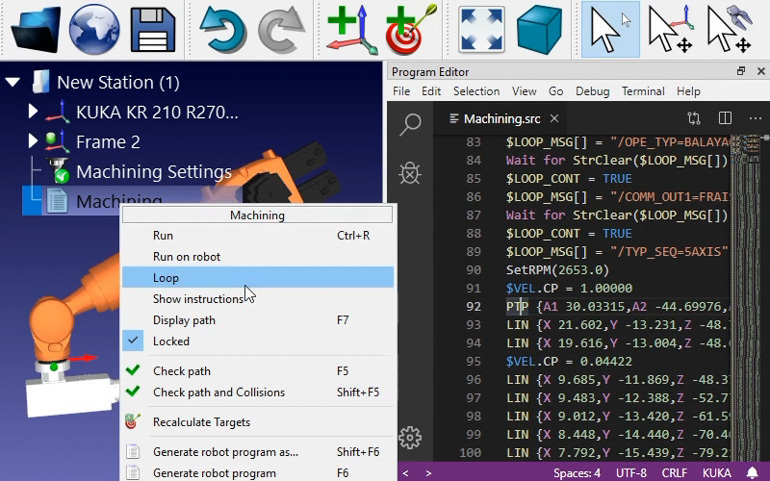
RoboDK is a strong simulation and offline programming instrument. | Credit: RoboDK
There are two major courses offered by the RoboDK API for Matlab:
- The Robolink class is the hyperlink between RoboDK and Matlab. Any merchandise from the RoboDK station could be retrieved.
- The RobolinkMerchandise class is the place RoboDK objects are represented by the RobolinkMerchandise class. An merchandise is usually a robotic, a reference body, a instrument, an object, a program or a selected mission.
RoboDK is extensively relevant to varied functions, reminiscent of robotic machining, materials dealing with, sprucing, welding, synchronizing a number of robots or choose and place.
To get began, obtain the newest model of the Matlab API is out there from GitHub:
The major options of the RoboDK API for Matlab are the next:
- Simulate and program any robotic arm (industrial robots or cobots)
- An intuitive consumer interface to create robotic packages
- Automated era of robotic packages
- API for interfacing with MATLAB and different languages
- Import CAD recordsdata (reminiscent of STEP, IGES, STL) to make use of in your mission
[ad_2]