
{kind=link}
[ad_1]

Researchers Matthias Hofer, Michael Muehlebach and Raffaello D’Andrea have developed the one-wheel Cubli, a three-dimensional pendulum system that may steadiness on its pivot utilizing a single response wheel. How is it attainable to stabilize the 2 tilt angles of the system with solely a single response wheel?
The secret’s to design the system such that the inertia in a single route is greater than within the different route by attaching two plenty distant from the middle. As a consequence, the system strikes quicker within the route with the decrease inertia and slower within the route with the upper inertia. The controller can leverage this property and stabilize each instructions concurrently.
This work was carried out on the Institute for Dynamic Systems and Control, ETH Zurich, Switzerland.
Almost a decade has handed for the reason that first Cubli
The Cubli robotic began with a easy thought: Can we construct a 15cm sided dice that may bounce up, steadiness on its nook, and stroll throughout our desk utilizing off-the-shelf motors, batteries, and digital elements? The instructional article Cubli – A dice that may bounce up, steadiness, and stroll throughout your desk exhibits all of the design ideas and prototypes that led to the event of the robotic.
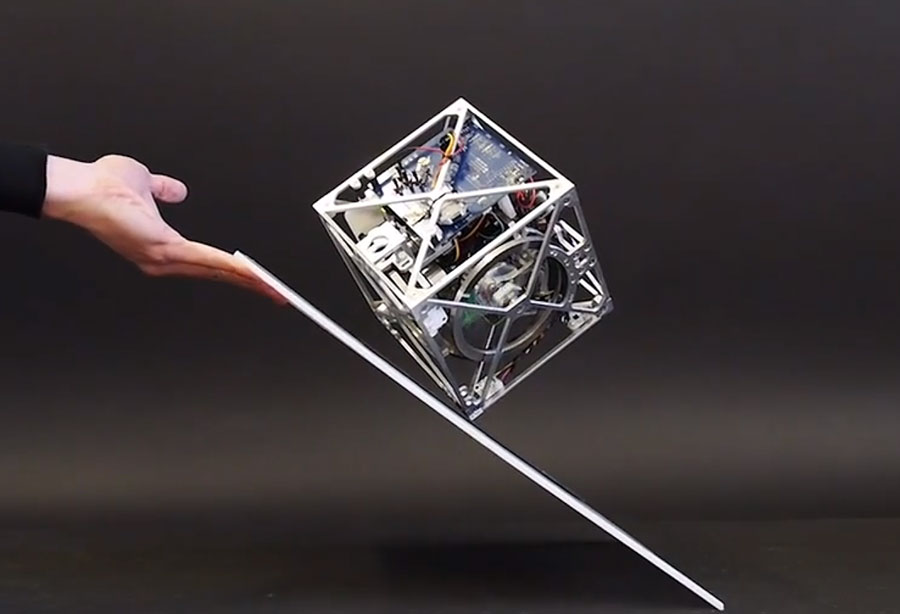
Cubli, from ETH Zurich.
tags: c-Research-Innovation
![]()
ETH Zurich
is among the main worldwide universities for expertise and the pure sciences.
![]()
ETH Zurich
is among the main worldwide universities for expertise and the pure sciences.

Daniel Carrillo-Zapata
was awared his PhD in swarm robotics on the Bristol Robotics Lab in 2020. He now fosters the tradition of “scientific agitation” to interact in two-way conversations between researchers and society.
Daniel Carrillo-Zapata
was awared his PhD in swarm robotics on the Bristol Robotics Lab in 2020. He now fosters the tradition of “scientific agitation” to interact in two-way conversations between researchers and society.
[ad_2]